
1.ОБЩИЕ СВЕДЕНИЯ ОБ АВТОПИЛОТЕ
1.1. Назначение, основные характеристики и комплектность автопилота
Автопилот АП-34 предназначен для автоматического пилотирования вертолетов Ми-8 (в комплектации АП-34Б-2) и Ми-6, Ми-10, Ми-10К (в комплектации АП-34Б-3).
Автопилот обеспечивает:
1) автоматическую стабилизацию углов крена, курса и тангажа;
2) улучшение устойчивости и управляемости вертолета путем демпфирования угловых колебаний;
3) автоматическую стабилизацию барометрической высоты полета;
4) автоматическую стабилизацию заданного гиромагнитного курса;
5) управление вертолетом по крену, курсу и тангажу с помощью рукояток управления автопилота;
6) автоматическую стабилизацию заданной приборной спорости полета.
Автопилот в своей работе использует:
· авиагоризонты АГБ-3К или АГД-1, как датчики текущих значений углов крена и тангажа,
· гиромагнитный компас ГМК-1А, как датчик гиромагнитного курса,
· корректор-задатчик высоты КЗВ (автопилот АП-34Б-3), как датчик отклонения от заданной барометрической высоты,
· корректор-задатчик скорости приборной КЗСП, как датчик отклонения от заданной приборной скорости,
· комбинированные агрегаты управления КАУ-30Б и рулевые агрегаты РА-60А (автопилот АП-34Б-2) и комбинированные рулевые привода РП-28 с блоками магнитных усилителей БМУ (автопилот АП-34Б-3) как исполнительные устройства.
Включение автопилота не требует предварительной настройки и может производиться на любом курсе. Зона рабочих углов по крену и тангажу не оговаривается. В автопилоте предусмотрена возможность раздельного отключения каналов направления, крена и тангажа одной кнопкой "Откл." и канала высоты другой кнопкой "Откл."
Для работы автопилота требуется напряжение питания постоянного тока 27±2,7В и переменного тока 36±2В, 400±8Гц. Автопилот потребляет не более 2,2А по постоянному току и не более 3А (в каждой фазе) по переменному току.
Время готовности автопилота к включению в диапазоне температур от -60°С до +50°С не превышает 2 минуты.
Автопилот обеспечивает следующую точность стабилизации в спокойной атмосфере при невмешательстве летчика в управление:
по курсу ±2°;
по тангажу и крену ±1°;
по высоте ± 6 м (на высотах до 1000 м) и ±12 м (на высотах свыше 1000 м);
по скорости ±15 км/ч.
Масса автопилота - 23 кг (АП-34Б-2) и 20 кг (АП-34Б-3).
В комплект автопилота входят:
1) пульт управления (ПУ);
2) агрегат управления (АУ);
3) три датчика угловой скорости направления, крена и тангажа (ДН, ДК, ДТ);
4) блок усилителей (БУ);
5) два компенсационных датчика (КД);
6) индикатор нулевой (ИН);
7) три кнопки отключения (КО);
8) корректор высоты (КВ-2).
В комплекте АП-34Б-3 корректор КВ-11 отсутствует.
1.2. Принцип действия автопилота
Полет вертолета, как движение в пространстве всякого свободного тела, можно рассматривать состоящим из вращения вокруг центра масс относительно 3-х осей и движения самого центра масс относительно земли вдоль каждой из 3-х осей. При пилотировании вертолета летчик и автопилот управляют как угловыми движениями (вращением вертолета относительно центра масс), так и траекторными движениями (движение центра масс).
Необходимым условием выполнения траекторных движений является стабилизация угловых движений вертолета. Так как по угловым движениям вертолет является неустойчивым, то обеспечение стабилизации угловых движений вертолета требует затраты больших усилий со стороны летчика. Эти функции берет на себя автопилот.
Особенностью данного автопилота является сохранение замкнутой системы "вертолет-летчик" даже при работающем автопилоте, так как на органы управления могут одновременно воздействовать и летчик, и автопилот (рис. 1).
Возможность такой совместной работы летчика и автопилота осуществляется путем последовательного дифференциального включения органов управления в механическую проводку управления, при котором результирующее перемещение органов управления вертолета равно алгебраической сумме перемещений от управляющих воздействий летчика и автопилота.

Рис.1. Структурная схема системы управления
Дифференциальное управление осуществляется при помощи электрогидравлических агрегатов управления, выходной шток которых может перемещаться как от рычагов управления летчика (при этом рулевой агрегат работает как гидроусилитель, необходимый в системе управления вертолета для уменьшения усилий, прикладываемых летчиком к рычагам управления), так и от электрических сигналов автопилота, которые управляют перемещением якоря специального электрического поляризованного реле, установленного в рулевом агрегате. Якорь поляризованного реле перемещает специальный золотник (или сопло-заслонку), перемещение которого, в свою очередь, вызывает перемещение выходного штока рулевого агрегата.
Конструкция рулевых агрегатов такова, что перемещения органов управления от сигналов автопилота не передаются на рычаги управления летчика и ограничены 20% полного перемещения органов управления.
Такое ограничение необходимо для обеспечения безопасности полета в случае отказа автопилота, так как большинство возможных отказов автопилота сопровождается появлением одностороннего сигнала на выходе и быстрым отклонением органов управления. Вместе с тем такой ограниченный диапазон работы органов управления от сигналов автопилота в большинстве случаев вполне достаточен для парирования реальных возмущений, действующих на вертолет, и стабилизации угловых положений вертолета.
Однако в некоторых случаях (например, в канале направления при разгонах или торможениях) такого запаса управления для автопилота недостаточно и стабилизация в этих случаях может нарушаться. Чтобы этого не происходило, в системе путевого управления вертолета применены специальные рулевые агрегаты (типа РА-60А) с так называемой "перегонкой".
"Перегонкой" называется такой режим работы рулевого агрегата, при котором происходит автоматическое перемещение с постоянной скоростью выходного штока рулевого агрегата вместе с рычагами управления летчика. Включается режим "перегонки" автоматически при полном использовании автопилотом своего запаса управления. "Перегонка" расширяет запас управления для автопилота, заставляя перемещаться рычаги управления летчика в ту же сторону, в которую не хватило запаса управления от автопилота. Скорость "перегонки" из условия безопасности выбирается достаточно малой (около 10% от максимальной скорости).
Суммарное перемещение органов управления (от автопилота и от "перегонки") вызовет движение вертолета к первоначальному положению, что приведет, в свою очередь, к автоматическому выключению "перегонки". В случае необходимости летчик может остановить "перегонку" и заставить органы управления двигаться в нужном направлении, приложив определенное усилие к рычагам управления.
Для обеспечения автоматического управления курсом, креном, тангажом и высотой автопилот воздействует соответственно на шаг хвостового винта, на автомат переноса в поперечном или продольном направлении и на шаг несущего винта. В канале высоты при вмешательстве летчика в управление автопилот отключается. Управление скоростью полета происходит воздействием на автомат перекоса в продольном направлении, то есть так же, как и при управлении тангажом, так как скорость полета вертолета при неизменном общем шаге несущего винта зависит, главным образом, от угла тангажа вертолета. Хотя стабилизация угла тангажа косвенно обеспечивает стабилизации скорости полета, но точность стабилизации при этом недостаточна.
2. РАБОТА АВТОПИЛОТА
2.1. Работа автопилота в канале направления
2.1.1. Режимы и законы управления в канале направления
Канал направления автопилота работает в режимах:
· согласование;
· стабилизация гиромагнитного курса;
· управление с помощью ручки центровки.
Структурная схема канала направления автопилота в режиме согласования представлена на рис.2.

Рис.2. Структурная схема канала направления автопилота
в режиме согласования
В режиме согласования происходит обнуление рассогласования по курсу в механизме согласования с передаточной функцией  таким образом, чтобы сигнал угла курса на входе сервопривода канала направления автопилота был равен нулю.
таким образом, чтобы сигнал угла курса на входе сервопривода канала направления автопилота был равен нулю.
Структурная схема канала направления автопилота в режиме стабилизации курса представлена на рис.3.
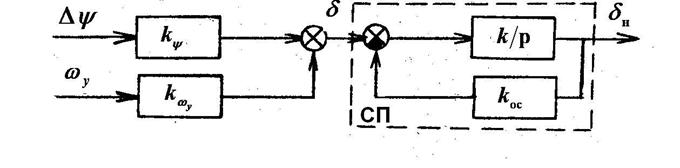
Рис.3. Структурная схема канала направления в режиме стабилизации курса
В режиме стабилизации курса в автопилоте используются два сигнала: с курсовой системы сигнал текущего курса ![]() , преобразованный в механизме МС в сигнал изменения курса
, преобразованный в механизме МС в сигнал изменения курса ![]() , и с датчика угловой скорости сигнал
, и с датчика угловой скорости сигнал ![]() . Эти сигналы суммируются, усиливаются и поступают на рулевой агрегат с передаточной функцией
. Эти сигналы суммируются, усиливаются и поступают на рулевой агрегат с передаточной функцией ![]() , который изменяет шаг хвостового винта на величину
, который изменяет шаг хвостового винта на величину ![]() , пропорциональную сумме входных сигналов.
, пропорциональную сумме входных сигналов.
Сервопривод охвачен жесткой обратной связью. Сигнал обратной связи пропорционален перемещению органа управления ![]() . Передаточная функция сервопривода равна
. Передаточная функция сервопривода равна  , где коэффициент усиления сервопривода
, где коэффициент усиления сервопривода ![]() обычно велик, поэтому постоянная времени
обычно велик, поэтому постоянная времени ![]() , и, в первом приближении, можно считать, что
, и, в первом приближении, можно считать, что ![]() . Закон управления автопилота в режиме стабилизации курса имеет следующий вид:
. Закон управления автопилота в режиме стабилизации курса имеет следующий вид:
 , (1)
, (1)
где ![]() - передаточное число автопилота по курсу (коэффициент пропорциональности между величиной изменения шага хвостового винта и сигналом угла);
- передаточное число автопилота по курсу (коэффициент пропорциональности между величиной изменения шага хвостового винта и сигналом угла);
![]() - передаточное число автопилота по угловой скорости курса (коэффициент пропорциональности между величиной изменения шага хвостового винта и сигналом угловой скорости).
- передаточное число автопилота по угловой скорости курса (коэффициент пропорциональности между величиной изменения шага хвостового винта и сигналом угловой скорости).
Следует иметь в виду, что если на вертолет действует постоянное возмущение (момент ![]() ), то для парирования его требуется какое-то перемещение органов управления
), то для парирования его требуется какое-то перемещение органов управления ![]() и, следовательно, в установившемся режиме при
и, следовательно, в установившемся режиме при ![]() потребуется какое-то управляющее воздействие
потребуется какое-то управляющее воздействие  . Это значит, что вертолет оказывается отклоненным от стабилизируемого положения на величину
. Это значит, что вертолет оказывается отклоненным от стабилизируемого положения на величину ![]() , которая называется статической ошибкой. Величина ее зависит как от величины действующего возмущения, так и от величины передаточного числа
, которая называется статической ошибкой. Величина ее зависит как от величины действующего возмущения, так и от величины передаточного числа ![]() . Если возмущение таково, что
. Если возмущение таково, что ![]() , то наступает режим "перегонки".
, то наступает режим "перегонки".
Структурная схема канала направления автопилота в режиме управления по курсу от рукоятки "центровка" представлена на рис.4.
В режиме управления по курсу от рукоятки "центровка" в автопилоте используются три сигнала: с курсовой системы сигнал текущего курса ![]() , с рукоятки "центровка" на пульте управления сигнал поправки по направлению на угол
, с рукоятки "центровка" на пульте управления сигнал поправки по направлению на угол ![]() и с датчика угловой скорости сигнал
и с датчика угловой скорости сигнал ![]() . Закон управления автопилота в режиме управления по курсу от рукоятки ''центровка" имеет вид:
. Закон управления автопилота в режиме управления по курсу от рукоятки ''центровка" имеет вид:
 . (2)
. (2)
С помощью рукоятки можно изменить курс самолета на небольшой угол, так как полный оборот рукоятки соответствует 10° поворота вертолета. Если летчику необходимо существенно изменить направление полета, то он обычным способом перемещает педали, разворачивая вертолет на заданный курс. При этом летчик, устанавливая ноги на педали, выключает канал направления и переводит его в режим согласования. После вывода вертолета на заданный курс летчик, снимая ноги с педалей, автоматически включает канал направления.

Рис.4. Структурная схема канала направления автопилота
в режиме управления по курсу
Режим управления от педалей в канале направления автопилота АП-34Б-3 отличается тем, что при постановке ног на педали канал направления автопилота не отключается. Сигнал угла обнуляется в механизме согласования, а сигнал угловой скорости пропускается через дифференцирующую цепочку с передаточной функцией  . То есть, в канал направления автопилота поступает сигнал, пропорциональный угловому ускорению разворота вертолета и канал направления в режиме управления вертолетом по курсу от педалей работает как демпфер. Структурная схема автопилота АП-34Б-3 в этом режиме представлена на рис. 5.
. То есть, в канал направления автопилота поступает сигнал, пропорциональный угловому ускорению разворота вертолета и канал направления в режиме управления вертолетом по курсу от педалей работает как демпфер. Структурная схема автопилота АП-34Б-3 в этом режиме представлена на рис. 5.

Рис.5. Структурная схема автопилота АП-34Б-3
в режиме управления от педалей
Закон управления имеет вид:
 . (3)
. (3)
2.1.2. Включение питания и режим согласования в канале направления
Принципиальная электрическая схема канала направления автопилота представлена на рис.6. При включении АЗС автопилота +27В напряжение постоянного тока поступает на входы 1 и 2 пульта ПУ, где запитывает обмотку тахогенератора М1; на входы 1 и 2 агрегата управления АУ, где запитывает трансформатор Тр1; на входы 1 и 2 блока усилителей БУ, где запитывает полупроводниковый усилитель канала направления.
При включении АЗС автопилота 36В напряжение переменного тока поступает на входы 24, 25 и 26 пульта ПУ, где запитывает трансформатор Тр1; на входы 3, 4 и 5 агрегата управления, где запитывает усилитель сервопривода, преобразователи П1 и П2 и блок питания БП, на входы 9 и 13 рулевого агрегата, где запитывает датчик обратной связи; на входы 1, 2 и 3 датчика угловой скорости ДН, где запитывает статорные обмотки гиромотора и индукционный датчик.
Режим согласования - это режим автоматической подготовки автопилота к включению силовой части. Для того, чтобы при включении автопилота не было рывка органов управления, необходимо, чтобы на выходе усилителя сервопривода УС1 отсутствовал сигнал. Это достигается тем, что все входные сигналы в режиме согласования равны нулю.

Рис.6. Принципиальная электрическая схема канала направления АП-34Б
На вход усилителя сервопривода поступают следующие сигналы. С выходов 11 и 12 рулевого агрегата РА1 поступает на входы 1РА и 2РА агрегата управления сигнал с датчика обратной связи, выдающий сигналы переменного тока, пропорциональные перемещению штока рулевого агрегата ![]() от автопилота. Конструктивно рулевой агрегат выполнен так, что при включенном автопилоте датчик обратной связи находится в нейтральном положении и выдает практически нулевой сигнал. С выходов 4 и 5 датчика угловой скорости ДН поступает на входы 8 и 9 агрегата управления сигнал с индукционного датчика переменного тока, пропорциональный угловой скорости вращения вертолета
от автопилота. Конструктивно рулевой агрегат выполнен так, что при включенном автопилоте датчик обратной связи находится в нейтральном положении и выдает практически нулевой сигнал. С выходов 4 и 5 датчика угловой скорости ДН поступает на входы 8 и 9 агрегата управления сигнал с индукционного датчика переменного тока, пропорциональный угловой скорости вращения вертолета ![]() . В установившемся полете
. В установившемся полете ![]() и сигнал с ДН практически равен нулю.
и сигнал с ДН практически равен нулю.
С выходов 1, 2 и 3 курсовой системы на входы 21, 22 и 23 пульта управления и далее с выхода 20 пульта управления на вход 9 агрегата управления поступает сигнал угла, характеризующий направление продольной оси вертолета в азимутальной плоскости и вырабатываемый сельсином-датчиком курсовой системы. В момент включения автопилота этот сигнал может быть не равен нулю.
Рассмотрим, как происходит обнуление сигнала угла канала направления. Сигнал с сельсина-датчика курсовой системы с выходов 1, 2 и 3 поступает на сельсин-приемник М4 пульта управления ПУ на входы 21, 22 и 23. С ротора сельсина-приемника через резистор R4 сигнал переменного тока через выход 19 пульта ПУ поступает на вход 18 блока усилителей БУ, на полупроводниковый усилитель. Усиленный сигнал переменного тока с выходов усилителя 4 и 5 поступает на входы 17 и 18 пульта ПУ на управляющие обмотки двигателя-генератора, который, вращаясь, через редуктор поворачивает ротор сельсина-приемника в положение, при котором сигнал с ротора сельсина-приемника становится практически равным нулю.
Для того чтобы ротор сельсина-приемника отрабатывался в нулевое положение без колебаний, на вход полупроводникового усилителя через резистор R1 с сигнальной обмотки тахогенератора двигателя поступает сигнал переменного тока, пропорциональный скорости вращения двигателя. Сигнал этот осуществляет демпфирование, так как находится в противофазе с позиционным сигналом с ротора сельсина-приемника. На выходе усилителя для его разгрузки от реактивной составляющей, обусловленной индуктивностью управлявших обмоток двигателя-генератора, установлен конденсатор С5, что делает сопротивление нагрузки усилителя в режиме пуска чисто активным.
Для облегчения теплового режима двигателя в цепи его обмотки возбуждения стоит понижающий трансформатор Тр1, с вторичной обмотки которого напряжение 24В поступает на обмотку возбуждения двигателя. В цепи обмотки возбуждения генератора стоит резистор R8 , ограничивающий ток через обмотку. Фазы переменного тока 36В 400Гц для запитки обмоток возбуждения двигателя выведены на штепсельный разъем пульта управления (входы 24, 25 и 26) для обеспечения возможности подбора фаз при стыковке автопилота с различными курсовыми системами (в случае, если роторы их сельсинов-датчиков запитаны различными фазами).
Из-за неточности обнуления угла, наличия остаточных сигналов с датчика обратной, связи и с датчика угловой скорости, из-за расцентровки самого усилителя сервопривода УС1 на выходе его все же может оказаться какой-то сигнал. Поэтому в схеме автопилота предусмотрен потенциометр R6 "Центр". Для обеспечения центровки в обе стороны от нуля потенциометр центровки запитан от специального источника постоянного тока ± 15В. Таким источником служит выпрямитель БП1 переменного тока 36В 400Гц. При вращении потенциометра центровки на вход усилителя сервопривода, поступает сигнал, компенсирующий все сигналы на выходе. Эта центровка производится при техническом обслуживании автопилота.
2.1.3. Включение канала направления автопилота и работа в режиме стабилизации курса
Режим стабилизации курса включается после окончания режима согласования. Летчик узнает об окончании режима согласования по прекращению вращения шкалы центрирования курса пульта управления, связанной с ротором сельсина-приемника М4. Для включения режима стабилизации летчик нажимает кнопку-лампу КнЛ1 включения канала направления на пульте ПУ. При этом +27В с входа 6 пульта ПУ через нормально замкнутый контакт реле Р1, нормально замкнутый контакт 1 кнопки-лампы отключения канала направления КнЛ4 и нормально замкнутый контакт 2 кнопки-лампы КлЛ1 поступает на лампочку, которая загорается зеленым светом. Одновременно + 27В поступает через нормально замкнутый контакт реле Р2 на реле Р3, Р4 и Р5, электромагнит ЭМ1 и на выход 13 пульта управления.
Контакт реле Р5 блокирует кнопку КнЛ1. Контакты реле Р3 и Р4 разрывают цепи питания обмоток возбуждения двигателя-генератора канала направления М1. Двигатель, а, следовательно, и связанный с ним ротор сельсина- приемника М5 оказываются заторможенными. Торможение создается за счет трения в редукторе и срабатывая электромагнита ЭМ1, который своим якорем прижимается к специальному фрикционному диску, сидящему на одной оси с ротором сельсина-приемника. Сельсин-приемник начинает работать в заторможенном режиме и сигнал изменения курса вертолета с ротора сельсина-приемника через выход 20 пульта управления поступает на вход 9 агрегата управления.
При включении канала направления +27В поступает с выхода 13 пульта управления на реле РН. Это реле своими контактами подает +27В на обмотку подмагничивания реле (РЭП-8Т) в рулевом агрегате РА1 (Вход 2) и на гидроклапан, который переключает рулевой агрегат на работу по дифференциальной схеме в автопилотном режиме.
Включение канала направления автопилота АП-34Б-3 происходит несколько иначе. После нажатия на кнопку КнЛ1 на ПУ +27В поступает на выход 45 пульта ПУ на реле РН, которое своими контактами подает +27В на обмотку подмагничивания реле РЭП-8Т в рулевом приводе РП1 и на электрокран ГА-185, который переключает рулевой привод на работу по дифференциальной схеме в автопилотном режиме. Выход 13 пульта ПУ при этом используется для подачи +27В на распределительную коробку автопилота РК, где срабатывает реле, обеспечивающее прохождение +27В при отказе курсовой системы.
После включения канала направления всякое отклонение вертолета от первоначального курса будет вызывать изменение шага хвостового винта и, как следствие, возвращать вертолет на первоначальный курс. Сигнал изменения курса с сельсина-датчика курсовой системы поступает на сельсин-приемник в пульте управления. Сельсин-приемник при этом находится в заторможенном режиме и сигнал с ротора сельсина-приемника поступает на выход 20 пульта ПУ и вход 9АУ агрегата управления. Далее этот сигнал поступает на первичную обмотку трансформатора Тр1, который применен для согласования выходного сопротивления сельсина-приемника с сопротивлением нагрузки. С выходной обмотки трансформатора сигнал поступает на преобразователь П2, который в данном случае работает как двухполупериодный фазочувствительный выпрямитель. Обмотка опорного напряжения преобразователя П2 в канале направления выведена на штепсельный разъем агрегата управления (входа 10АУ и 11АУ) для того, чтобы была возможность подбора фаз опорного напряжения преобразователя при стыковке автопилота с различными курсовыми системами (в случае, если роторы их сельсинов-датчиков запитаны различными фазами).
После преобразователя П2 сигнал угла через потенциометр регулировки передаточного числа "Угол" 42 и резистор 5 поступает на вход усилителя сервопривода УС1. При отклонении вертолета от заданного курса вместе с сигналом угла на вход усилителя сервопривода поступает и сигнал угловой скорости курса. Как только вертолет начинает поворачиваться, датчик угловой скорости ДН с выходов 4 и 5 индукционного датчика выдает сигнал переменного тока пропорционально угловой скорости поворота вертолета. Этот сигнал поступает на вход 7АУ агрегата управления и далее на преобразователь П1.
Преобразователь П1 состоит из двух однополупериодных фазочувствительных выпрямителей (ФЧВ). Сигнал угловой скорости поступает на вход одного из этих фазочувствительных выпрямителей. С выхода 6 ФЧВ выпрямленный сигнал угловой скорости через потенциометр регулировки передаточного числа "Угл. скор." 41 и резистор 3 поступает на вход усилителя сервопривода, где и суммируется с сигналом угла (параллельное суммирование сигналов на резисторах). Благодаря высокому коэффициенту усиления усилителя сервопривода оказалось возможным во входных цепях поставить большие по сравнению с сопротивлением входной обмотки усилителя сервопривода сопротивления, что практически исключает влияние входных цепей друг на друга.
Суммарный сигнал угла и угловой скорости усиливается усилителем сервопривода УС1 и с выходов 3РА, 4РА, 5РА агрегата управления поступает на входы 3, 4, 5, 6 рулевого агрегата РА1 на дифференциально включенные обмотки поляризованного реле РЭП-8Г.
В автопилоте АП-54Б-3 суммарный сигнал угла и угловой скорости, усиленный усилителем сервопривода, поступает на дифференциально включенные обмотки магнитного усилителя УМ1 в блоке БМУ, последовательно с обмотками которого включены сопротивления для имитации нагрузки (обмоток реле РЭП-8Т рулевого агрегата). Усиленный сигнал с выхода БМУ поступает на параллельно включенные обмотки поляризованного реле РЭП-8Т рулевого привода РП-28.
Якорь поляризованного реле перемещает золотник на величину, пропорциональную входному сигналу. Это вызывает, в свою очередь, перемещение штока малого цилиндра и, следовательно, выходного штока со скоростью, пропорциональной величине перемещения золотника, то есть суммарному управляющему сигналу. Как только шток малого цилиндра начинает перемещаться, датчик обратной связи, установленный в рулевом приводе, начинает выдавать сигнал переменного тока, пропорциональный ходу штока малого цилиндра. Этот сигнал поступает на вход 1РА агрегата управления и на вход 3 второго, однополупериодного фазочувствительного выпрямителя в преобразователе П1.
Выпрямленный сигнал обратной связи через резистор 1 поступает на вход усилителя сервопривода УС1. При этом полярность сигнала обратной связи обратна полярности управляющего сигнала угла и угловой скорости. По мере движения штока малого цилиндра рулевого агрегата сигнал датчика обратной связи возрастает. При достижении равенства сигнала датчика обратной связи управляющему сигналу наступает компенсация входных сигналов, и движение штока рулевого агрегата прекращается, а шаг хвостового винта оказывается изменен на величину, пропорциональную управляющему сигналу угла и угловой скорости.
После фазочувствительного выпрямителя сигнал обратной связи через резистор 2 с выхода 6АУ агрегата управления поступает на визуальный прибор магнитоэлектрической системы ИН-4, стрелка которого, отклоняясь, указывает положение штока малого цилиндра рулевого агрегата и, следовательно, отклонение шага хвостового винта от первоначального положения, соответствующего моменту включения автопилота.
Вследствие изменения шага хвостового винта вертолет начинает изменять свой курс и сигнал рассогласования с курсовой системы уменьшается. Сигнал угла на входе усилителя сервопривода становится меньше сигнала обратной связи, и входной сигнал на УС1 меняет знак. Якорь поляризованного реле рулевого агрегата отклоняется в обратную сторону, и шток малого цилиндра начинает возвращаться в нейтральное положение. Сигнал обратной связи уменьшается. Когда вертолет выйдет на заданный курс, сигнал угла станет равным нулю, шток рулевого агрегата вертолета вернется в нейтральное положение, сигнал обратной связи обнуляется, а шаг хвостового винта примет первоначальное значение. Процесс регулирования заканчивается.
Кнопка КнЛ4 на пульте управления отключает канал направления. Кроме того, все каналы автопилота можно отключить кнопками отключения на рычаге управления летчиков.
2.1.4. Работа канала направления автопилота в режиме управления
Если необходимо ввести поправку по курсу в пределах ±5°, летчик нажимает и поворачивает на пульте управления рукоятку курса. При этом будет поворачиваться шкала, видная в окошко над рукояткой. На шкале написаны оцифрованные деления, каждое их которых соответствует одному градусу поворота вертолета. При повороте шкалы ротор сельсина-приемника, который через редуктор жестко связан со шкалой, поворачивается и появляется сигнал рассогласования, который с ротора сельсина-приемника через выход 20 ПУ поступает на вход 9 агрегата управления.
Усиленный в усилителе сервопривода сигнал поступает на обмотки поляризованного реле рулевого агрегата, и его шток начинает перемещаться, вызывая изменение шага хвостового винта. Появляется сигнал обратной связи, пропорциональный перемещению штока рулевого агрегата, который поступает на вход агрегата управления и уравновешивает сигнал рассогласования по углу. Вертолет начинает разворачиваться по курсу, и сигнал рассогласования между сельсином-датчиком курсовой системы и сельсином-приемником пульта ПУ уменьшается. Под действием сигнала обратной связи шток рулевого агрегата возвращается к нейтральному положению и окончательно вернется к нейтрали, когда вертолет выйдет на установленный рукояткой центровки курс.
Рассмотрим теперь режим управления вертолетом по курсу при включенном автопилоте с помощью педалей. Если летчик устанавливает ноги на педали, то срабатывают концевики на подпедальниках и +27В поступает на вход 2 пульта ПУ и на реле Р2. Контакты этого реле разрывают цепь питания реле Р3, Р4, РН и ЭМ1. Это значит, что рулевой агрегат переключается на неавтоматический режим работы (от педалей, а контакты реле Р3 и Р4 подают питание на обмотки возбуждения двигателя-генератора. Теперь лётчик может управлять курсом обычным образом, перемещая педали в нужном направлении. При отклонении вертолета сигнал изменения курса будет обнуляться в режиме согласования.
В автопилоте АП-34Б-3 реле РН подключено к выходу 45 пульта управления, поэтому при постановке ног на педали отключения реле не происходит. Сигнал угловой скорости подается в распределительную коробку автопилота, где преобразуется к изодромному виду и поступает на вход агрегата управления. Таким образом, канал направления автопилота АП-34Б-3 в режиме управления вертолетом по курсу от педалей работает как демпфер.
2.2. Работа автопилота в канале крена
2.2.1. Режимы и законы управления в канале крена
Канал крена автопилота работает в режимах:
· согласование;
· стабилизация крена;
· управление с помощью ручки центровки.
Структурная схема канала крена автопилота в режиме согласования представлена на рис.7.

Рис.7. Структурная схема канала крена автопилота в режиме согласования
В этом режиме происходит обнуление рассогласования по крену в механизме согласования таким образом, чтобы сигнал угла крена на входе сервопривода канала крена был равен нулю.
Структурная схема канала крена автопилота в режиме стабилизации курса представлена на рис.8.

Рис.8. Структурная схема канала крена автопилота в режиме стабилизации
В этом режиме в автопилоте используются два сигнала; с авиагоризонта сигнал текущего крена ![]() , преобразованный в механизме согласования МС в сигнал изменения крена
, преобразованный в механизме согласования МС в сигнал изменения крена ![]() и с датчика угловой скорости сигнал
и с датчика угловой скорости сигнал ![]() . Сервопривод автопилота в канале крена также охвачен жесткой обратной связью, пропорционально перемещению штока рулевого агрегата. Закон управления автопилота в режиме стабилизации крена имеет вид:
. Сервопривод автопилота в канале крена также охвачен жесткой обратной связью, пропорционально перемещению штока рулевого агрегата. Закон управления автопилота в режиме стабилизации крена имеет вид:
![]() , (4)
, (4)
где ![]() - передаточное число автопилота по углу крена;
- передаточное число автопилота по углу крена;
![]() - передаточное число автопилота по угловой скорости крена.
- передаточное число автопилота по угловой скорости крена.
При действии на вертолет постоянного возмущения (момента ![]() ) появится статическая ошибка
) появится статическая ошибка ![]() . Режима "перегонки" в канале крена нет.
. Режима "перегонки" в канале крена нет.
Структурная схема канала крена автопилота в режиме управления от рукоятки центровки представлена на рис. 9.

Рис.9. Структурная схема канала крена автопилота в режиме управления от рукоятки центровки
Закон управления имеет вид:
 . (5)
. (5)
При вмешательстве летчика в управление канал крена не выключается. На вход автопилота с компенсационного датчика крена поступает электрический сигнал, пропорциональный отклонению рычага управления летчика по крену ![]() и обратный по знаку сигналу изменение угла крена. Структурная схема канала крена автопилота в режиме управления от рычага управления летчика представлена на рис.9.
и обратный по знаку сигналу изменение угла крена. Структурная схема канала крена автопилота в режиме управления от рычага управления летчика представлена на рис.9.
Закон управления автопилота имеет вид:
 . (6)
. (6)
В автопилоте АП-34Б-3 компенсационный датчик используется также для гашения возможных колебаний крена, вызываемых летчиком. Это вызвано тем, что управляющие воздействия летчика по крену, как правило, содержат колебания рычага управления с частотой примерно 0,5 Гц, которые при включенном автопилоте могут вызвать колебания по крену. Поэтому сигнал с компенсационного датчика, пропорциональный перемещению рычага управления, пропускается через фильтр с передаточной функцией  и поступает на сервопривод автопилота, вызывая перемещение рулевого агрегата
и поступает на сервопривод автопилота, вызывая перемещение рулевого агрегата ![]() . При этом полярность этого сигнала выбирается таким образом, чтобы перемещение рулевого агрегата от автопилота было противоположным перемещению рулевого агрегата от перемещения рычага управления летчика
. При этом полярность этого сигнала выбирается таким образом, чтобы перемещение рулевого агрегата от автопилота было противоположным перемещению рулевого агрегата от перемещения рычага управления летчика ![]() . Это приводит к тому, что суммарное управляющее воздействие летчика на вертолет оказывается:
. Это приводит к тому, что суммарное управляющее воздействие летчика на вертолет оказывается:
 , (7)
, (7)
где ![]() = 0,5 с.
= 0,5 с.
Это означает, что в статике (при медленных перемещениях рычага управления летчика в новое положение) эффективность управления при включенном автопилоте сохраняется неизменной. Если же летчик начинает перемещать рычаг быстрее, то начинает сказываться запаздывающее влияние инерционного звена  и эффективность управляющих воздействий падает. Тем самым устраняется причина возникновения раскачки вертолета.
и эффективность управляющих воздействий падает. Тем самым устраняется причина возникновения раскачки вертолета.
Угол отклонения вертолета по крену при включенном автопилоте пропорционален отклонению рычага управления летчика.
В связи с тем, что перемещение рулевого агрегата от сигналов автопилота ограничено, при больших значениях углов ![]() автопилот перестает функционировать.
автопилот перестает функционировать.
При необходимости выполнения длительного виража со стабилизированным креном  необходимо пользоваться ручкой центровки крена на пульт ПУ, координируя разворот управлением по курсу педалями, либо отключая канал крена и включая его снова после вывода вертолета на заданный крен.
необходимо пользоваться ручкой центровки крена на пульт ПУ, координируя разворот управлением по курсу педалями, либо отключая канал крена и включая его снова после вывода вертолета на заданный крен.
2.2.2. Включение питания и режим согласования в канале крена
Электрическая принципиальная схема канала крема автопилота представлена на рис.10.

Рис.10. Принципиальная электрическая схема канала крена автопилота АП-34Б
При включении АЗС автопилота постоянного тока +27В запитывает обмотку тахогенератора М1 в пульте управления, трансформатор Тр2 в агрегате управления, полупроводниковый усилитель канала крена блока усиления. В канале крена фазы запитки Тр2 в ПУ подобраны в соответствии с запиткой сельсинов-датчиков авиагоризонтов АГД-1, АГБ-3К и ЦГВ-10В. Применение датчиков крена с другой фазировкой недопустимо. При включении А3С автопилота переменного тока 36В 400Гц запитывает трансформатор Тр2 пульта управления, усилитель сервопривода канала крена, преобразователи ПЗ, П4, блок питания БП агрегата управления; датчик обратной связи рулевого агрегата крена; статорные обмотки гиромотора и индукционный датчик датчика угловой скорости крена ДК.
В режиме согласования обнуляются все сигналы на входе усилителя сервопривода канала крена УС2, чтобы не было рывков рулевого агрегата и автомата перекоса при включении автопилота. С выходов 11 и 12 рулевого агрегата РА2 поступает на входа 6РА и 7РА агрегата управления сигнал с датчика обратной связи переменного тока, пропорциональный перемещению штока рулевого агрегата ![]() от автопилота. Конструкция рулевого агрегата РА2 обеспечивает нахождение штока рулевого агрегата в нейтральном положении, а следовательно, нулевой сигнал с датчика обратной связи при включении гидропитания и питания автопилота. Сигнал с датчика угловой скорости ДК равен нулю, так как автопилот включается в установившемся режиме полета, когда
от автопилота. Конструкция рулевого агрегата РА2 обеспечивает нахождение штока рулевого агрегата в нейтральном положении, а следовательно, нулевой сигнал с датчика обратной связи при включении гидропитания и питания автопилота. Сигнал с датчика угловой скорости ДК равен нулю, так как автопилот включается в установившемся режиме полета, когда ![]() .
.
Обнуление сигнала угла крена происходит следующим образом. Сигнал угла крена с сельсина-датчика авиагоризонта поступает на дифференциальный сельсин компенсационного датчика крена КДК, а затем на входы 31, 32, 33 пульта управления на сельсин-приемник М5. С ротора сельсина-приемника через резистор сигнал переменного тока поступает на вход полупроводникового усилителя канала крема У2 блока усилителей БУ. Усиленный сигнал переменного тока поступает на входа 27 и 28 пульта ПУ на управляющие обмотки двигателя-генератора К2, который, вращаясь, через редуктор, поворачивает ротор сельсина-приемника в положение, при котором сигнал с ротора сельсина-приемника становится равным нулю. С сигнальной обмотки тахогенератора через резистор R2 снимается сигнал обратной связи для улучшения динамики работы двигателя.
Этот сигнал осуществляет демпфирование, так как находится в противофазе с позиционным сигналом с ротора сельсина-приемника. На выходе усилителя БУ для его разгрузки от реактивной составляющей, обусловленной индуктивностью управляющих обмоток двигателя-генератора, установлен конденсатор С6, что делает сопротивление нагрузки усилителя чисто активным. Трансформатор Тр2 служит для облегчения теплового режима двигателя М2 благодаря понижению напряжения питания с 36В до 24В.
Из-за неточности обнуления угла крена, наличия остаточных сигналов с датчиков обратной связи и угловой скорости и расцентровки усилителя сервопривода УС2 на выходе канала крена все же может оказаться остаточный сигнал. Для обнуления этого сигнала в процессе технического обслуживания служит потенциометр центровки "Центр" R46 агрегата управления. Шлиц этого потенциометра выведен на лицевую панель агрегата. Для обеспечения стабильного сигнала с этот потенциометра он запитывается стабилизированным напряжением +15В от блока питания БП.
После окончания режима согласования (около 2-х минут) возможно включение режима стабилизации крена.
2.2.3. Включение канала крена автопилота и работа в режиме стабилизации крена
Режим стабилизации крена включается после окончания режима согласования. Летчик узнает об этом по прекращению вращения шкалы центрирования крена пульта управления, связанной с ротором сельсин приемника 5.
Для включения режима стабилизации летчик нажимает кнопку-лампу КнЛ2 включения канала крена на пульте ПУ (одновременно включается и накал тангажа). При этом +27В с выхода 6 пульта ПУ через нормально замкнутый контакт 2 кнопки КнЛ2 поступает на лампочку, которая загорается зеленым светом. Одновременно +27В поступает на реле Р9, Р10, Р11 и электромагнит ЭМ2.
Контакт реле Р11 блокирует кнопку КнЛ2. Контакты реле Р9 и Р10 разрывает цепи питания обмотки возбуждения двигателя М2. Двигатель и, следовательно, связанный с ним ротор сельсина-приемника М5 оказываются заторможенными. Торможение обеспечивает срабатывание электромагнита ЭМ2, который своим якорем прижимается к специальному фрикционному диску, сидящему на одной оси с ротором сельсина-приемника. В результате любое изменение крена вертолета вызовет рассогласование в следящей системе «сельсин - датчик крена авиагоризонта - компенсационный датчик крена - сельсин-приемник крена пульта управления». Сигнал с ротора М5 через выход 30 пульта управления поступит на вход 16 агрегата управления.
При включении канала крена напряжение +27В поступает с выхода 14 пульта управления на реле РК, которое своими контактами подает +27В на обмотку подмагничивания реле (РЭП-8Т) в рулевом агрегате РА2 (вход 2) и на гидроклапан, который переключает рулевой агрегат на работу по дифференциальной схеме в автоматическом режиме.
После включения канала крена всякое отклонение вертолета от заданного крена будет приводить к отработке автомата перекоса в поперечном направлении и, как следствие, к возвращению вертолета к заданному крену. Это происходит следующим образом. Сигнал рассогласования по крену с ротора сельсина-приемника пульта управления поступает на вход 16 агрегата управления на первичную обмотку трансформатора Тр2, который обеспечивает согласование выходного сопротивления сельсина-приемника с сопротивлением нагрузки. С выходной обмотки трансформатора сигнал поступает на преобразователь П4, который выпрямляет его двухполупериодным способом, фазы опорного напряжения преобразователей П3 и П4 подобраны в соответствии с запиткой сельсинов-датчиков авиагоризонтов АГД-1, АГБ-3К и ЦГВ-10В. Применение датчиков крена с другой запиткой сельсинов-датчиков не допускается.
С преобразователя П4 сигнал угла через потенциометр регулировки передаточного числа "Угол" R45 и резистор R15 поступает на вход усилителя сервопривода УС2. Вместе с сигналом угла на вход усилителя сервопривода поступает и сигнал угловой скорости крена. Сигнал, пропорциональный ![]() , поступает с выходов 4 и 5 датчика ДК с сигнальной обмотки индукционного датчика. Этот сигнал переменного тока поступает на вход 14 агрегата управления и далее - на преобразователь ПЗ, который состоит из двух однополупериодных фазочувствительных выпрямителей.
, поступает с выходов 4 и 5 датчика ДК с сигнальной обмотки индукционного датчика. Этот сигнал переменного тока поступает на вход 14 агрегата управления и далее - на преобразователь ПЗ, который состоит из двух однополупериодных фазочувствительных выпрямителей.
Для выпрямления сигнала с ДК задействован один из них. Выпрямленный сигнал угловой скорости через потенциометр регулировки передаточного числа "Угл. скорость" R44 и резистор R13 поступает на вход усилителя сервопривода УС2, где способом параллельного суммирования сигналов на резисторах суммируется с сигналом угла. Большой коэффициент усиления усилителя обеспечивает исключение влияния входных цепей друг на друга (сопротивление резисторов R13 и R15 выбраны большими по сравнению с сопротивлениями входной обмотки усилителя УС2).
Усиленный управляющий сигнал с выхода усилителя УС2 и выходов 8РА, 9РА, 10РА агрегата управления поступает на входы 3, 4, 5, 6 рулевого агрегата РА2 на дифференциально включенные обмотки поляризованного реле РЭП-8Т. Якорь поляризованного реле перемещает золотник на величину, пропорциональную входному сигналу. Это вызывает перемещение штока малого цилиндра и, следовательно, выходного штока рулевого агрегата, что приводит к изменению угла наклона автомата перекоса в поперечной оси. С датчика обратной связи рулевого агрегата ведается сигнал переменного тока, пропорциональный величине хода штока малого цилиндра.
Этот сигнал поступает на вход 6РА агрегата управления, на вход 3 второго однополупериодного фазочувствительного выпрямителя в преобразователе П3. Выпрямленный сигнал обратной связи через резистор R11 поступает на вход усилителя сервопривода УС2. Полярность сигнала обратной связи обратна полярности сигналов угла и угловой скорости. По мере движения штока малого цилиндра рулевого агрегата сигнал обратной связи возрастает, и при достижении равенства с сигналами угла и угловой скорости движение штока рулевого агрегата прекращается, и отклонение несущего винта в поперечной плоскости оказывается пропорциональным управляющим сигналам угла и угловой скорости.
С резистора R12 с выхода 13 агрегата управления снимается сигнал на визуальный магнитоэлектрический прибор ИН-4, стрелка которого показывает положение штока малого цилиндра ролевого агрегата и, следовательно, отклонение несущего винта в поперечной плоскости.
Вследствие отклонения несущего винта вертолет начинает изменять крен и сигнал рассогласования со следящей системы крена уменьшится. Сигнал угла на входе усилителя УС2 становится меньше сигнала обратной связи, что приводит к смене знака управляющего сигнала. Якорь поляризованного реле рулевого агрегата РА2 отклоняется в обратную сторону, и шток малого цилиндра начинает возвращаться в нейтральное положение. Сигнал обратной связи уменьшается и при выходе вертолета на заданный крен сигнал рассогласования по углу станет равным нулю, шток рулевого агрегата и несущий винт вернутся в нейтральное положение, сигнал обратной связи обнулится, и процесс регулирования закончится.
2.2.4. Работа канала крена автопилота в режиме управления
Управление вертолетом по крену в пределах ±5° осуществляется рукояткой центровки РЦ крена на пульте управления. При этом поворачивается шкала с оцифрованными делениями, каждое из которых соответствует одному градусу поворота вертолета. При повороте шкалы ротор сельсина-приемника М5, связанный через редуктор со шкалой, поворачивается и появляется сигнал рассогласования, поступающий на выход 30 пульта управления и вход 16 агрегата управления. Далее процесс аналогичен режиму стабилизации крена. Вертолет меняет крен до тех пор, пока не придет в равновесие следящая система крена, то есть текущий угол крена с авиагоризонта не станет равным заданному углу, установленному рукояткой центровки крена на ПУ.
Рассмотрим режим управления вертолетом по крену при включенном автопилоте с помощью рычага управления. При отклонении рычага, связанный с ним ротор компенсационного датчика КДК поворачивается таким образом, что в сёльсинной передаче происходит компенсация сигналов угла, появляющихся в результате отклонения вертолета по крену, сигналами компенсационного датчика. Таким образом, вмешательство автопилота в работу летчика становится минимальным. Летчик почти не ощущает того, что автопилот включен, за исключением того, что автопилот улучшает устойчивость вертолета за счет сигнала с датчика ДК.
В автопилоте АП-34Б-3 сигнал с компенсационного датчика поступает в распределительную коробку автопилота, где ограничивается по величине и пропускается через дифференцирующее звено, и подается на вход 17 агрегата управления. Поэтому сигнал с компенсационного датчика КДК будет проходить на вход усилителя канала крена только при наличии скорости перемещения рычага управления летчика. В момент движения рычага управления по крену сигнал, пропорциональный скорости движения рукоятки, вызывает перемещение органов поперечного управления вертолета от автопилота в направлении, обратном перемещению органов управления от непосредственного воздействия летчика на рулевой агрегат. Таким образом обеспечивается удобное управление вертолетом по крену.
2.3. Работа автопилота в канале тангажа
2.3.1. Режим и законы управления в канале тангажа
Канал тангажа автопилота работает в режимах:
· согласование;
· стабилизация тангажа;
· стабилизация приборной скорости;
· управление тангажом с помощью ручки центровки.
Структурная схема канала тангажа автопилота в режиме согласования представлена на рис.11.

Рис.11. Структурная схема канала тангажа автопилота в режиме согласования
В этом режиме происходит обнуление рассогласования по тангажу в механизме согласования таким образом, чтобы сигнал угла тангажа на входе сервопривода канала тангажа был равен нулю.
Структурная схема канала тангажа автопилота в режиме стабилизации тангажа представлена на рис.12.

Рис.12. Структурная схема канала тангажа автопилота
в режиме стабилизации
В этом режиме в автопилоте используются два сигнала с автопилота сигнал текущего тангажа ![]() , преобразованный в механизме согласования МС в сигнал изменения тангажа
, преобразованный в механизме согласования МС в сигнал изменения тангажа ![]() , и с датчика угловой скорости сигнал
, и с датчика угловой скорости сигнал ![]() . Сервопривод охвачен жесткой обратной связью. Закон управления автопилота в режиме стабилизации тангажа имеет вид:
. Сервопривод охвачен жесткой обратной связью. Закон управления автопилота в режиме стабилизации тангажа имеет вид:
![]() , (8)
, (8)
где ![]() - передаточное число автопилота по углу тангажа;
- передаточное число автопилота по углу тангажа;
![]() - передаточное число автопилота по угловой скорости тангажа.
- передаточное число автопилота по угловой скорости тангажа.
При действии на вертолет постоянного возмущения (момента ![]() ) появится статическая ошибка
) появится статическая ошибка ![]() . Режима ”перегонки” в канале тангажа нет.
. Режима ”перегонки” в канале тангажа нет.
Структурная схема канала тангажа автопилота в режиме стабилизации приборной скорости представлена на рис. 13.

Рис.13. Структурная схема канала тангажа автопилота
в режиме управления рукояткой скорости
В этом режиме используется дополнительно сигнал отклонения от заданной приборной скорости ![]() с корректора-задатчика скорости приборной. Закон управления имеет вид:
с корректора-задатчика скорости приборной. Закон управления имеет вид:
![]() , (9)
, (9)
где ![]() - передаточное число автопилота по приборной скорости.
- передаточное число автопилота по приборной скорости.
На пульте управления в канале тангажа также имеется ручка центровки тангажа. Работа ее аналогична работе ручки центровки в канале направления.
Структурная схема канала тангажа в режиме управления от рукоятки центровки представлена на рис.14.

Рис.14. Структурная схема канала в режиме управления от рукоятки центровки
Закон управления имеет вид:
![]() . (10)
. (10)
В остальном режим управления канала тангажа существенно отличается от режима управления канала направления. При вмешательстве летчика в управление с помощью обычных рычагов управления канал тангажа не выключается. При изменении в горизонтальном полете скорости летчик должен установить рычаг управления в новое балансировочное положение. При этом вертолет должен изменить балансировочное значение угла тангажа. Это изменение угла тангажа, сигнал которого поступает в автопилот, вызывает соответствующее перемещение рулевого агрегата.
Так как перемещение рулевого агрегата по сигналам автопилота ограничены двадцатью процентами полного перемещения органов управления, то может оказаться, что весь автопилотный диапазон управления будет использован и автопилот перестанет функционировать. Чтобы этого не происходило, на вход автопилота поступает дополнительный электрический сигнал ![]() , пропорциональный отклонению ручки управления летчика по тангажу и обратный по знаку сигналу изменения угла тангажа. Этот сигнал выдается компенсационным датчиком, установленным в системе управления вертолета. Структурная схема канала тангажа автопилота в режиме управления от рычага управления летчика представлена на рис.15.
, пропорциональный отклонению ручки управления летчика по тангажу и обратный по знаку сигналу изменения угла тангажа. Этот сигнал выдается компенсационным датчиком, установленным в системе управления вертолета. Структурная схема канала тангажа автопилота в режиме управления от рычага управления летчика представлена на рис.15.
Закон управления автопилота имеет вид:
![]() . (11)
. (11)
В автопилоте АП-34Б-3 сигнал угловой скорости пропускается через дифференцирующую цепочку, и закон управления имеет вид:
 . (12)
. (12)

Рис. 15. Структурная схема канала тангажа в режиме управления от рычага летчика.
2.3.2. Включение питания и режим согласования в канале тангажа
Электрическая принципиальная схема канала тангажа автопилота представлена на рис.16.
Рис.16. Принципиальная электрическая схема канала тангажа
автопилота АП-34Б
При включении АЗС автопилота постоянного тока + 27В запитывает обмотку тахогенератора М3 в пульте управления ПУ, трансформатор Тр3 в агрегате управления АУ и полупроводниковый усилитель канала тангажа блока усиления БУ. При включении АЗС автопилота переменного тока 36В 400Гц запитывает трансформатор Тр3 пульта управления ПУ: усилитель сервопривода канала тангажа УС3, преобразователи П5, П6 и блок питания БП агрегата управления; датчик обратной связи рулевого агрегата тангажа РА3; статорные обмотки гиромотора и индукционный датчик датчика угловой скорости тангажа ДТ.
В режиме согласования обнуляются все сигналы на входе усилителя сервопривода канала тангажа УС3, чтобы не было рывков рулевого агрегата и автомата перекоса при включении автопилота. С выходов 11 и 12 рулевого агрегата РА3 на входы 11РА и 12РА агрегата управления поступает сигнал переменного тока с датчика обратной связи, пропорциональный перемещению штока рулевого агрегата ![]() от автопилота. Конструкция рулевого агрегата РА3 обеспечивает нейтральное положение штока рулевого агрегата и, следовательно, отсутствие сигнала с датчика обратной связи при включении питания автопилота. Сигнал с датчика угловой скорости ДТ равен нулю, так как автопилот включается при отсутствии маневра, когда
от автопилота. Конструкция рулевого агрегата РА3 обеспечивает нейтральное положение штока рулевого агрегата и, следовательно, отсутствие сигнала с датчика обратной связи при включении питания автопилота. Сигнал с датчика угловой скорости ДТ равен нулю, так как автопилот включается при отсутствии маневра, когда ![]() .
.
Обнуление сигнала угла тангажа происходит следующим образом. Сигнал угла тангажа с сельсина-датчика авиагоризонта поступает на дифференциальный сельсин компенсационного датчика тангажа КДТ, а затем на входы 38, 39 и 40 пульта управления на сельсин-приемник М6. С ротора сельсина-приемника через резистор R6 сигнал переменного тока поступает на вход полупроводникового усилителя канала тангажа У3 блока усилителей БУ. Усиленный сигнал переменного тока поступает на входы 34 м 35 пульта управления на управляющие обмотки двигателя генератора М3, который, вращаясь, через редуктор поворачивает ротор сельсина-приемника М6 в положение, при котором сигнал рассогласования с ротора сельсина-приемника равен нулю. С сигнальной обмотки тахогенератора через резистор R3 снимается сигнал обратной связи для улучшения динамики работы двигателя. Конденсатор С7 на выходе блока усилителей БУ обеспечивает разгрузку усилителя от реактивной составляющей. Трансформатор Тр3 понижает напряжение питания двигателя М3 с 36В до 24В для обеспечения лучшего теплового режима.
Для обнуления остаточных сигналов на входе усилителя сервопривода УС3, обусловленных расцентровкой усилителя и неточностью обнуления сигнала угла тангажа, служит потенциометр центровки ”Центр” R49 агрегата управления. Центровка входного сигнала сервопривода регулируется в наземных условиях при техническом обслуживании. Стабильность нуля входного сигнала обеспечивает стабилизированный источник питания БП +15В.
2.3.3. Включение канала тангажа автопилота и работа в режиме стабилизации тангажа и скорости
Режим стабилизации тангажа включается после окончания режима согласования. Летчик определяет момент окончания режима согласования по прекращению вращения шкалы центрирования тангажа на пульте управления, которая связана с ротором сельсина-приемника М6.
Включение режима стабилизации происходит при нажатии на кнопку-лампу КнЛ2 включения канала тангажа (одновременно включается и канал крена). При этом +27В с входа 6 пульта управления через нормально замкнутый контакт 2 кнопки-лампы КнЛ2 поступает на лампочку, и реле Р7, Р8, Р11 и электромагнит ЭМ3.
Контакт реле Р11 блокирует кнопку КнЛ2. Контакты реле Р7 и Р8 разрывают цепи питания обмотки возбуждения двигателя М3. Двигатель, а следовательно, и связанный с ним механически ротор сельсина-приемника М6 оказываются заторможенными. Торможение обеспечивается срабатыванием электромагнита ЭМ3, который своим якорем прижимается к специальному фрикционному диску, сидящему на одной оси с ротором сельсина-приемника.
В результате любое изменение тангажа вертолета вызовет рассогласование в следящей системе «сельсин-датчик тангажа авиагоризонта компенсационный датчик тангажа - сельсин-приемник тангажа пульта управления». Сигнал с ротора сельсина-приемника М6 через выход 37 пульта управления поступит на вход 21 агрегата управления.
При включении канала тангажа +27В поступает с выхода 14 пульта управления на реле РТ, которое своими контактами подает +27В на обмотку подмагничивания реле (РЭП-8Т) в рулевом агрегате РА3 (вход 1) и на гидроклапан, который переключает рулевой агрегат на работу по дифференциальной схеме в автопилотном режиме.
После включения канала тангажа всякое отклонение вертолета от заданного тангажа будет приводить к отработке автомата перекоса в продольном направлении и, как следствие, возвращению вертолета к заданному тангажу. Это происходит следующим образом. Сигнал рассогласования по тангажу поступает через вход 21 агрегата управления на первичную обмотку трансформатора Тр3, который обеспечивает согласование выходного сопротивления сельсина-приемника с сопротивлением нагрузки. С выходной обмотки трансформатора сигнал поступает на преобразователь П6, который выпрямляет его по способу двухполупериодного выпрямления. Фазы опорного напряжения преобразователей П5 и П6 подобраны в соответствии с запиткой сельсинов-датчиков авиагоризонтов АГД-1, АГБ-3К, ЦГВ-10В. Применение датчиков тангажа с другой запиткой сельсинов-датчиков не допускается.
С преобразователя П6 сигнал угла через потенциометр регулировки передаточного числа "Угол" R48 и резистор R25 поступает на вход усилителя сервопривода УС3. Одновременно на усилитель УС3 поступает и сигнал угловой скорости тангажа ![]() с выходов 4 и 5 датчика ДТ с сигнальной обмотки индукционного датчика. Этот сигнал переменного тока поступает на вход 19 агрегата управления и далее на преобразователь П5, один из однополупериодных фазочувствительных выпрямителей которого используется для выпрямления сигнала с ДТ. Выпрямленный сигнал угловой скорости через потенциометр регулировки передаточного числа "Угловая скорость" R47 и резистор R23 поступает на вход усилителя сервопривода УС3.
с выходов 4 и 5 датчика ДТ с сигнальной обмотки индукционного датчика. Этот сигнал переменного тока поступает на вход 19 агрегата управления и далее на преобразователь П5, один из однополупериодных фазочувствительных выпрямителей которого используется для выпрямления сигнала с ДТ. Выпрямленный сигнал угловой скорости через потенциометр регулировки передаточного числа "Угловая скорость" R47 и резистор R23 поступает на вход усилителя сервопривода УС3.
Усиленный управляющий сигнал с выхода усилителя УС3 и выходов 13РА, 14РА и 15РА агрегата управления поступает на входы 3, 4, 5, 6 рулевого агрегата РА3 на дифференциально включенные обмотки поляризованного реле РЭП-8Т. Якорь реле перемещает золотник пропорционально входному сигналу. Это вызывает перемещение штока малого цилиндра и, следовательно, выходного штока рулевого агрегата, что приводит к изменению угла канала автомата перекоса в продольной оси.
С датчика обратной связи рулевого агрегата выдается сигнал переменного тока, пропорциональный величине хода штока малого цилиндра. Этот сигнал поступает на вход 11РА агрегата управления на второй однополупериодный выпрямитель преобразователя П5. Выпрямленный сигнал обратной связи через резистор R21 поступает на вход усилителя сервопривода УС3. Полярность сигнала обратной связи обратна полярности сигнала угла. По мере движения штока малого цилиндра рулевого агрегата сигнал обратной связи возрастает, при достижении равенства с сигналом угла движение штока рулевого агрегата прекращается, и отклонение несущего винта в продольной плоскости оказывается пропорциональным управляющим сигналам угла и угловой скорости.
С резистора R22 с выхода 18 агрегата управления снимается сигнал на визуальный магнитоэлектрический прибор ИН-4, стрелка которого показывает положение штока малого цилиндра рулевого агрегата тангажа и, следовательно, отклонение несущего винта в продольной плоскости.
Вследствие отклонения несущего винта вертолет начинает изменять тангаж, и сигнал рассогласования со следящей системы тангажа уменьшается. Сигнал угла на входе усилителя УС3 становится меньше сигнала обратной связи, что приводит к смене знака управляющего сигнала. Шток малого цилиндра рулевого агрегата начинает возвращаться в нейтральное положение. Сигнал обратной связи уменьшается, и при выходе вертолета на заданный тангаж сигнал рассогласования по углу станет равным нулю, шток рулевого агрегата и несущий винт вернутся в нейтральное положение, сигнал обратной связи обнулится, и процесс регулирования закончится.
В автопилоте АП-34Б-3 предусмотрен режим стабилизации приборной скорости. В качестве датчика отклонения вертолета от заданной приборной скорости используется корректор-задатчик скорости приборной КЗСП. При включенном в режим стабилизации канале тангажа (после нажатия кнопки КнЛ2 на пульте управления) +27В с выхода 14 пульта управления поступает в распределительную коробку автопилота при достижении заданной скорости полета летчик включает тумблер “Вкл. КЗСП'', расположенный на центральном пульте летчика. Сигнал готовности +27В, характеризующий готовность к работе КЗСП, с блока стабилизации готовности БСГ поступает в распределительную коробку автопилота. Там срабатывает реле, и сигнал +27В с пульта управления ПУ поступает в КЗСП и на сигнальную лампочку "Вкл. КЗСП'', расположенную на центральном пульте летчика. КЗСП переключается на работу в режиме коррекции. С выхода КЗСП сигнал постоянного тока, пропорциональный изменению скорости полета ∆V, поступает в распределительную коробку на потенциометр регулировки передаточного числа по скорости полета и далее в агрегат управления на вход 22 на вход усилителя сервопривода УС3. Управляющий сигнал через блок магнитных усилителей БМУ отклоняет шток малого цилиндра РП-28 канала тангажа, вследствие чего отклоняется несущий винт в продольной плоскости и стабилизируется заданное значение скорости полета.
На клеммах К17 и К20, выведенных на лицевую панель агрегата управления, можно в наземных условиях измерить сигнал обратной связи и входной управляющий сигнал.
2.3.4. Работа канала тангажа автопилота в режиме управления
Управление вертолетом по тангажу в пределах ±5° осуществляется рукояткой центровки РЦ тангажа на пульте управления. Работа канала тангажа аналогична работе канала крена, рассмотренного в разделе 2.2.4. Отличие заключается в использовании компенсационного датчика тангажа для компенсации-сигнала угла тангажа в сельсинной передаче.
2.4. Работа автопилота в канале высоты
2.4.1. Режим и законы управления в канале высоты
Канал высоты автопилота работает в режиме стабилизации барометрической высоты.
Структурная схема канала высоты автопилота в режиме стабилизации представлена на рис.17.

Рис.17. Структурная схема канала высоты автопилота в режиме стабилизации
В этом режиме используется сигнал отклонения вертолета от заданной барометрической высоты ![]() с корректора высоты. Сервопривод автопилота охвачен жесткой обратной связью, пропорциональной перемещению штока рулевого агрегата, воздействующего на шаг несущего винта. Закон управления имеет вид:
с корректора высоты. Сервопривод автопилота охвачен жесткой обратной связью, пропорциональной перемещению штока рулевого агрегата, воздействующего на шаг несущего винта. Закон управления имеет вид:
 . (13)
. (13)
В автопилоте АП-34Б-3, который взаимодействует с корректором-задатчиком КЗВ, сигнал ![]() поступает на дифференцирующую цепочку с передаточной функцией
поступает на дифференцирующую цепочку с передаточной функцией  и суммируется с сигналом
и суммируется с сигналом ![]() . Закон управления в этом случае имеет вид:
. Закон управления в этом случае имеет вид:
 . (14)
. (14)
Наличие жесткой обратной связи обусловливает присутствие статической ошибки  при действии постоянного возмущения.
при действии постоянного возмущения.
Управление высотой летчиком от рычага "шаг-газ" приводит к отключению канала высоты автопилота. После вывода вертолета на нужную высоту для обеспечения ее стабилизации летчик вновь нажимает кнопку включения канала высоты на пульте ПУ автопилота, включая канал в работу.
2.4.2. Включение питания и режим согласования в канале высоты
Электрическая принципиальная схема канала высоты автопилота представлена на рис.18.
Рис.18. Принципиальная электрическая схема канала высоты
автопилота АП-34Б
При включении АЗС автопилота переменного тока 36В 400Гц запитывает обмотки возбуждения двигателя и индукционного датчика корректора высоты; усилитель сервопривода УС4, преобразователь П7 и блок питания БП агрегата управления; датчик обратной связи рулевого агрегата высоты РА4.
В режиме согласования должен быть обнулен сигнал с выхода корректора высоты КВ. Это обеспечивается механически с помощью центрирующих пружин, которые устанавливают щетку потенциометра ПКВ в нулевое положение (против средней точки) при отсутствии сигнала включения КВ на входе 20 (на входе электромагнитной муфты).
При включении АЗС постоянного тока +27В через нормально замкнутый контакт "Отключение автопилота", находящийся на рычагах управления летчиков, вход 6 пульта управления, нормально замкнутый, контакт реле Р1 и выход 7 пульта управления поступает на нормально замкнутый контакт кнопки отключения канала высоты, расположенный на рукоятке "Общий шаг". После этой кнопки + 27В поступает на вход 9 пульта управления, на нормально замкнутой контакт кнопки отключения канала высоты КнЛ4 на пульте управления и далее на нормально разомкнутый контакт 2 кнопки включения канала высоты КнЛ3.
2.4.3. Включение канала высоты автопилота и работа в режиме стабилизации высоты
При нажатии на кнопку КнЛ3 +27В поступает на реле Р6, которая своим контактом блокирует кнопку включения канала высоты. Одновременно с этим +27В через выход 16 пульта управления поступает на реле РВ, которое своими контактами включает рулевой агрегат. Кроме того, +27В поступает на вход 20 корректора высоты КВ на электромагнитную муфту, которая освобождает щетку потенциометра ПКВ, и корректор высоты начинает выдавать в агрегат управления сигнал постоянного тока, пропорциональный изменению барометрической высоты полета вертолета.
Этот сигнал поступает на вход 24 агрегата управления и далее через регулировочный потенциометр передаточного числа высоты R50 и постоянный резистор R35 на вход усилителя сервопривода УС4. При отклонении от заданной барометрической высоты под действием сигнала с корректора высоты, пропорционального этому отклонению, сервопривод канала высоты автопилота будет изменять шаг несущего винта до тех пор, пока сигнал обратной связи, поступающий с датчика обратной связи РА4 с выхода 11 на вход 16 РА агрегата управления к преобразователю П7, не уравновесит сигнал с корректора высоты. Вследствие изменения шага несущего винта вертолет начнет изменять высоту, и сигнал с корректора будет уменьшаться. В результате под действием сигнала обратной связи, который становится больше сигнале высоты, рулевой агрегат начнет возвращаться в нейтральное положение. Тогда вертолет выйдет на заданную высоту, процесс управления закончится.
Работа канала высоты автопилота АП-34Б-3 несколько отличается. Этот автопилот работает в комплекте с корректором-задатчиком высоты. Включение режима стабилизации возможно при наличии сигнала исправности КЗВ, поступающего с блока сигнализации готовности БСГ на распределительную коробку автопилота. Другая особенность заключается в формировании наряду с сигналом отклонения от заданной барометрической высоты сигнала производной этого отклонения с помощью RC цепочки.
В канале высоты, в отличие от остальных каналов, на пульте управления имеется нажимной тумблер "контроль", при помощи которого при наземной отладке автопилота можно устанавливать шток малого цилиндра высоты на упор в ту или в другую сторону. В полете этот тумблер нажимать нельзя.
Преобразователь П7 канала высоты используется также для работы канала крена. При отклонении рукоятки летчика с компенсационного датчика КДК на вход 30 агрегата управления АУ и вход 4 преобразователя П7 поступает сигнал переменного тока. На входе преобразователя стоят 4 диода Д1¸Д4, ограничивающие величину входного, напряжения до Uвх<25В с целью обеспечения необходимых условий работы преобразователя. На выходе преобразователя стоит конденсатор С1 для фильтрации выпрямленного сигнала. Далее выпрямленный сигнал поступает на ячейку типа Тр/(Тр+1), состоящую из двух конденсаторов С2, СЗ и резистора R19 . Далее сигнал подается на вход усилителя сервопривода крена УС2.
2.4.4. Работа канала высоты автопилота в режиме управления
Если летчик хочет вмешаться в управление вертолета при включенном канале высоты, он должен нажать на гашетке на рукоятку "Общий шаг". При этом рвется +27В поступавшее на вход 9 пульта управления, и канал высоты выключается, так как обесточиваются реле Р6 и РВ. После вывода вертолета на нужную высоту для обеспечения стабилизации этой новой высоты летчику необходимо вновь включить высотный канал нажатием кнопки на пульте управления.
3. ОТКЛЮЧЕНИЕ АВТОПИЛОТА
В случае необходимости летчик может выключить в полете либо один из каналов, либо весь автопилот. Кнопки поканального отключения автопилота расположены на пульте. Кнопки отключения всего автопилота расположены на рукоятках управления летчиков. При нажатии на кнопку "Откл. АП'' снимается +27В с выхода 6 пульта управления. При этом обесточиваются Р3¸Р11, РН, РК, РТ, РВ, электромагниты ЭМ1¸ЭМ3. Это значит, что все каналы автопилота выключаются (переводятся в режим согласования). Для отключения канала направления летчик нажимает на кнопку КнЛ4 на пульте, управления. При этом обесточиваются реле Р3¸Р5; РН и ЭМ1, и канал направления переводится в режим согласования. Аналогично происходит отключение канала высоты.
Выключение всего автопилота может производиться также выключением тумблера АЗС АП. При этом рвется все питание АП.
4. КОНТРОЛЬ АВТОПИЛОТА
В автопилоте предусмотрены элементы встроенного контроля, при использовании которых производится проверка функционирования автопилота перед полетом непосредственно на вертолете без подключения специальной аппаратуры и без снятия бортовых датчиков (гировертикали и курсовой системы) с вертолета.
Такими элементами в автопилоте являются: ручки центровки, тумблер "контроль" и кнопки-лампочки "Вкл." и "Откл." на пульте управления автопилота, индикатор нулевой ИН-4. С помощью ручек центровки и тумблера "Контроль" в автопилот задаются контрольные сигналы, которые вызывают отработку сервоприводов и отклонение подвижных стрелок индикатора нулевого, что свидетельствует о перемещении штоков рулевых агрегатов по сигналам автопилота.
Для проведения регламентных работ в агрегате управления автопилота предусмотрен специальный контрольный разъем, к которому подключается пульт проверки.
5. ПИЛОТИРОВАНИЕ ВЕРТОЛЕТА ПРИ ПОМОЩИ
АВТОПИЛОТА
Взлет производится при включенном автопилоте (кроме канала высоты). На пульте управления нажимаются кнопки-лампы "Вкл. крен - тангаж", "Вкл. направление". В случае отключения автопилота в полете повторное включение разрешается производить на любом установившемся режиме.
Канал высоты разрешается включать на высоте не ниже 50 м. При необходимости изменения высоты канал высоты следует отключать.
Вертикальный взлет с включенным автопилотом практически не отключается от техники выполнения взлета на вертолете без автопилота. При взлете рекомендуется держать ноги на педалях и выдерживать курс отклонением педалей. В случае выполнения взлета с брошенными педалям заданный курс выдерживается с точность до 10°.
Висение выполняется так же, как и на вертолете без автопилота, Автопилот стабилизирует вертолет по углам крена и тангажа, и, при освобожденных педалях, по углу курса, что существенно упрощает технику выполнения висения на вертолете с автопилотом.
Движения ручкой управления, необходимые для сохранения места висения, на вертолете с автопилотом должны быть более плавными. Нет необходимости в двойных движениях ручкой управления, обязательных при пилотировании вертолета без автопилота.
При висении необходимо следить за работой автопилота по нулевому индикатору. Нормальная работа автопилота характеризуется небольшими колебаниями стрелок К, Т, Н индикатора около нейтрального положения. Стрелка индикатора Н должна колебаться только при брошенных педалях управления. Если ноги летчика находятся на педалях, то канал направления находится в режиме согласования, а стрелка Н в нейтральном положении.
Если стрелки Т, Н, К в режиме висения находятся вблизи упоров, то необходимо поставить их в нейтральное положение с помощью ручек управления с одновременным перемещением ручек центровки на пульте управления или путем выключения и повторного включения автопилота.
Разгон и набор высоты можно выполнять с брошенными педалями управления. Вертолет при этом удерживается на заданном курсе с точностью от 4° до 10° (при разгоне нарушается равновесие моментов вокруг вертикальной оси, которое восстанавливается по сигналам автопилота с соответствующей статической ошибкой).
Развороты выполняются так же, как и на вертолёте без автопилота. При выполнении разворота ноги должны быть поставлены на педали. Для обеспечения длительного разворота со стабилизированным углом крена необходимо задавать крен ручкой центровки крена на пульте управления. Нельзя при этом снимать ноги с педалей во время разворота, так как это вызовет сильное скольжение вертолета из-за стремления автопилота удержать вертолет на том курсе, который был в момент снятия ног с педалей. Нельзя пользоваться тумблером задатчика курса и кнопкой согласования курсовой системы при включенном канале направления. При необходимости пользования задатчиком и кнопкой следует отключить канал направления, поставив ноги на педали или пользуясь кнопкой "Откл. направление" на пульте управления.
В горизонтальном полете при скоростях полета от 80 до 150 км/ч вертолет с автопилотом имеет тенденцию медленно уходить с заданной скорости (так как автопилот стабилизирует не скорость полета, а угол тангажа). Для выдерживания заданной скорости необходимо время от времени подправлять режим полета ручкой управления или ручкой "Тангаж" на пульте управления. При скоростях полета от 150 до 230 км/ч изменение скорости полёта существенно меньше. При включении канала высоты поддерживается заданная барометрическая высота установившегося горизонтального полета.
Включение его можно выполнить только после сбалансирования вертолета на режиме горизонтального полета. При необходимости изменить высоту или скорость полета следует отключить канал высоты до изменения режима, полета и включить его вновь после того, как вертолет сбалансирован на новом режиме полета. Контроль работы канала высоты после его включения производится по индикатору ИН-4. Нормальная работа канала характеризуется выдерживанием высоты полета с точностью ±6 м в спокойной атмосфере до высоты 1000 м (свыше 1000 м с точностью ±12 м) и колебаниями стрелки индикатора ИН-4 около нейтрального положения. Уход стрелки В индикатора на верхний или нижний упор свидетельствует о неправильной балансировке вертолета для данного режима горизонтального полета (велика или мала мощность двигателей). При уходе стрелка на верхний упор следует немного уменьшить мощности двигателей, при уходе на нижний упор - увеличить.
Перед посадкой следует поставить ноги на педали и выдерживать заданный курс на посадке отклонением педалей. При выполнении взлета с разбегом и посадки с пробегом автопилот следует отключать.
6. ОТКАЗЫ АВТОПИЛОТА И ДЕЙСТВИЯ ЛЕТЧИКА ПРИ РАЗЛИЧНЫХ ОТКАЗАХ
Отказ автопилота по каналам крена, тангажа и высоты в полете может привести к одностороннему уходу рулевого агрегата в крайнее положение. Этот отказ характеризуется незначительным, но ощутимым рывком вертолета (в зависимости от отказавшего канала), который должен быть парирован посредством ручного управления. Стрелка индикатора ИН-4 отказавшего канала отклоняется до упора в какое-либо крайнее положение и остается там.
При отказе такого рода в канале высоты следует после парирования рывка вертолета выключить канал высоты кнопкой "Откл. высоты" на пульте управления или кнопкой "Фрикцион" на любой ручке "Шаг-газ".
"При отказе каналов крена и тангажа после парирования рывка вертолета необходимо выключить автопилот кнопкой "Выкл. АП" на любой ручке управления вертолетом и убедиться, что соответствующие стрелки индикатора ИН-4 находятся в нейтральном положении.
При отказавшем канале высоты автопилот можно включить по каналам направления, крена и тангажа. Повторное включение отказавшего канала запрещается.
Отказ автопилота по каналу направления с односторонним уходом рулевого агрегата в крайнее положение характеризуется вначале небольшим рывком вертолета по курсу с последующим уходом педалей в крайнее положение за время 3-5 с. Поэтому при преднамеренном развороте в полете по курсу следует немедленно поставить ноги на педали. При этом от нажатия подпедальников произойдет отключение канала направления, и движение педалей прекратится.
Контрольные вопросы
1.Назначение, основные характеристики и комплектность автопилота.
2.Принцип действия автопилота.
3.Режимы и законы управления в канале направления.
4.Включение питания и режим согласования в канале направления.
5.Включение канала направления автопилота и работа в режиме стабилизации курса.
6.Работа канала направления автопилота в режиме управления.
7.Режимы и законы управления в канале крена.
8.Включение питания и режим согласования в канале крена.
9.Включение канала крена автопилота и работа в режиме стабилизации крена.
10. Работа канала крена автопилота в режиме управления.
11. Режимы и законы управления в канале тангажа.
12. Включение питания и режим согласования в канале тангажа.
13. Включение канала тангажа автопилота и работа в режиме стабилизации тангажа и скорости.
14. Работа канала тангажа автопилота в режиме управления.
15. Режимы и законы управления в канале высоты.
16. Включение питания и режим согласования в канале высоты.
17. Включение канала высоты автопилота и работа в режиме стабилизации высоты.
18. Работа канала высоты автопилота в режиме управления.
19. Отключение автопилота.
20. Контроль автопилота.
21. Пилотирование вертолета при помощи автопилота.
22. Отказы автопилота и действия летчика при различных отказах.
Литература
1. , Кузнецов управление полетом. - М.: Транспорт, 1995.
2. Кузнецов указания по изучению автопилота АП-34Б. - М.: МИИ ГА, 1989.
3. , , Кузнецов автоматического управления полетом: пособие по выполнению лабораторных работ «Автопилоты». - М.: МГТУ ГА, 2010.
СОДЕРЖАНИЕ
1. Общие сведения об автопилоте………………………………………….3
1.1. Назначение, основные характеристики и комплектность
автопилота……………………………………………………………………3
1.2. Принцип действия автопилота …………………………………….…..4
2. Работа автопилота………………………………………………...……….6
2.1. Работа автопилота в канале направления……….……………………..6
2.1.1. Режимы и законы управления в канале направления…….…………6
2.1.2. Включение питания и режим согласования
в канале направления………………………………………………………..9
2.1.3. Включение канала направления автопилота и работа в режиме стабилизации курса……………………………………………………………………11
2.1.4. Работа канала направления автопилота
в режиме управления …………………….………………………………...14
2.2. Работа автопилота в канале крена…….……………………………….15
2.2.1. Режимы и законы управления в канале крена………..…………..…15
2.2.2. Включение питания и режим согласования в канале крена …….…17
2.2.3. Включение канала крена автопилота и работа
в режиме стабилизации крена ……………………………………………...19
2.2.4. Работа канала крена автопилота в режиме управления ……………21
2.3. Работа автопилота в канале тангажа…………………………….…….22
2.3.1. Режимы и законы управления в канале тангажа………..…………..22
2.3.2. Включение питания и режим согласования в канале тангажа...…..25
2.3.3. Включение канала тангажа автопилота и работа
в режиме стабилизации тангажа и скорости ………...…………………….26
2.3.4. Работа канала тангажа автопилота в режиме управления...……….29
2.4. Работа автопилота в канале высоты………………………………...…29
2.4.1.Режимы и законы управления в канале высоты …………...………..29
2.4.2. Включение питания и режим согласования в канале высоты ….....30
2.4.3. Включение канала высоты автопилота и работа
в режиме стабилизации высоты ………………………………...…………31
2.4.4. Работа канала высоты автопилота в режиме управления.………...32
3. Отключение автопилота………………………………………………….32
4. Контроль автопилота …………………………………………………….33
5. Пилотирование вертолета при помощи автопилота…………………....33
6. Отказы автопилота и действия летчика при различных отказах…...….35
7. Контрольные вопросы…………………………………………………....35
Литература …………………………………………………………………..36
